Because science and technology are so closely related that their differences are frequently overlooked, they are frequently pronounced in the same breath and used as synonyms. Science is all about learning about natural phenomena and the reasons behind them, such as why the sky is blue. What makes the leaves green? Why does it rain? So on and so forth. When this knowledge is applied to meet human needs or solve problems, it is referred to as technology.
In short, science is concerned with theories, principles, and laws, whereas technology is concerned with products, processes, and designs. In this article excerpt, we will go over all of the major distinctions between science and technology.
Science is nothing but a process of exploring new knowledge, whereas technology is putting scientific knowledge into practice.
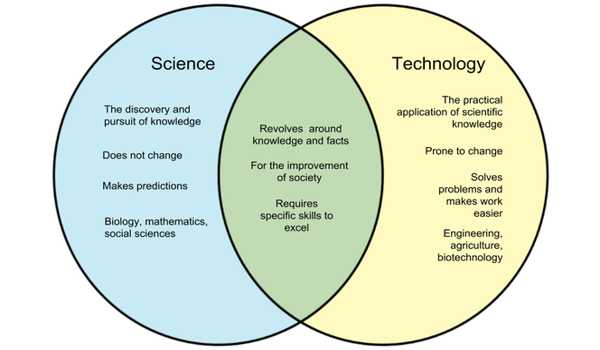
Difference between Science and Technology
SCIENCE
- Science is an organized method of gathering knowledge on a subject through various observations and experiments. It is a methodical approach to gaining knowledge on a specific subject through observation and experimentation.
- Simply put, science is the body of knowledge gained through analysis of all the things that exist around us. The knowledge is founded on facts and evidence about the subject, rather than opinions and personal preferences. As a result, scientific statements and laws cannot be challenged because they have been observed and tested.
- Science can be used to develop cutting-edge technology, cure diseases, and solve a variety of other problems. Continuous research is conducted to expand our scientific knowledge, leaving open the possibility of further investigation.
- Science is very useful for learning about natural phenomena and their causes. It does not change; only additions to further knowledge are made.
- Science emphasizes discovery, such as facts and natural laws. It is the study of the structure and behavior of the natural and physical worlds in order to develop premises.
TECHNOLOGY
- The term “technology” refers to the practical application of scientific knowledge for a variety of purposes. It is the practical application of scientific laws for various purposes.
- Technology is a collection of techniques, skills, processes, design, and products that are used to create instruments or gadgets or to complete scientific research. It is a body of knowledge with practical applications in the development, design, and use of products for industrial, commercial, or everyday use.
- We are surrounded by things that were created with the assistance of technology, whether we work, communicate, travel, manufacture, secure data, conduct business, or almost anywhere else. The majority of people use technology to both simplify and expand their abilities. It also ensures that various scientific problems are solved.
- Technology can be useful or harmful, that is, it can be both a boon and a curse, in that if used correctly, it can assist humans in solving a variety of problems, but if used incorrectly, it can cause the destruction of the entire world. Technology evolves at a rapid pace, in the sense that advancements in previous technology are made on a regular basis.
- Technology focuses on the inventions, such as the development of latest technique, to ease the work of humans. It deals with putting those premises into practice.
Science is concerned with the analysis, deduction, and development of theories. Technology, on the other hand, is based on design analysis and synthesis. Science is used to make predictions, whereas technology is used to simplify work and meet people’s needs.