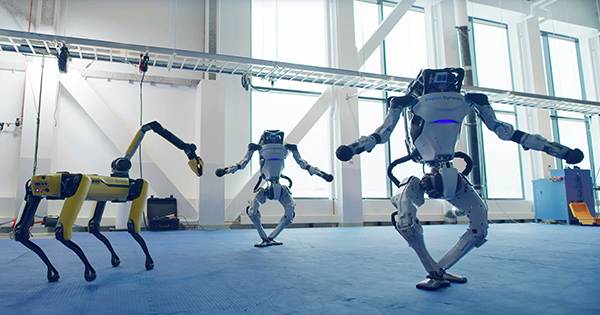
Robots are very well timed and facing any unusual surface or obstacle usually means a sudden stop or a hard fall. However, researchers have developed a new model for robotic locomotion that takes real-time shape with any region, changing its driver to fly to keep the truck from hitting sand, rocks, stairs, and other sudden changes. Although robotic movements can be versatile and precise, and robots can “learn” to step up, cross broken terrain, and learn, these behaviors are like individual trained skills that change within the robot. Yet the system is only working to correct a physical catastrophe while adopting the unchanged principle.
Some have models of adaptive movement but some are very precise (for example it is based on the movement of real insects) and others take enough time to work that the robot must be reduced as soon as it becomes effective. The team from Facebook AI, UC Berkeley, and Carnegie Mellon University called it Rapid Motor Adaptation. Humans and other animals are able to change the way they walk quickly, efficiently, and unknowingly to fit different situations.
“Say you learn to walk and the first time you go to the beach. Your leg is submerged and you need to apply more force to pull it. It sounds weird, but in a few steps you will be walking naturally on hard ground. Jitendra Malik, a senior researcher with Facebook AI and UC Berkeley, asked. Of course if you’ve never encountered a beach before, you’re not entering some special “sand mode” later in your life that lets you go over a soft surface. You move your way automatically and without any real perception of the external environment.
Malek explained: “What is happening is that your body responds to different physical conditions by realizing the different consequences of different conditions of its own body,” Malik explained – and the RMA system works the same way. “When we move into a new situation, in a very short time, in half a second or less, we have adequately measured what we are guessing what these conditions are and we will revise the walking principle.” The system was fully trained in the simulation, in the virtual version of the real world where the robot’s small brain (everything is operated locally on the board limited counting unit) learns to maximize the forward motion with minimal force and to avoid instantaneous observation and reaction.